



|
Obstacle Avoidance, Path Planning and Collaborative Operations UtopiaCompression’s Autonomous Vehicle Path Planning and Obstacle Avoidance Technologies 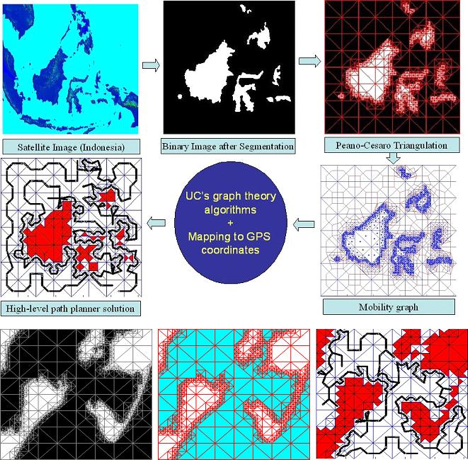 Adaptive multi-resolution tiling and path planning for optimal exploration Obstacle detection and avoidance capability UC is developing its capabilities on obstacle detection and avoidance, tracking obstacles and estimating the range using stereo sensors for maritime environments.  UC team conducting field tests at Marina Del Rey, CA Publications: [TCYW07] A.Tiwari, H.Chandra, J. Yadegar and J. Wang, “Constructing Optimal Cyclic Tours for Planar Exploration and Obstacle Avoidance: A Graph Theory Approach”, Advances in Cooperative Control and Optimization, Springer, 2007*. |
||
Home | Company | Research and Development | Careers | News | Contact
© 2007 UtopiaCompression. All Rights Reserved.